
Mosaic Walls
robotic construction of structural walls with concrete rubble
Technoledge construction design in collaboration with Annebel van der Meulen, Laila Hany & Mauritz von Kardorff
Welcome to our world of rubble!
This project explores the use of robotics in the construction industry to tackle challenges that exceed human capabilities. We use computational design processes to redesign concrete walls out of rubble stone to reduce embodied carbon emissions.
Concrete structures are all over the built environment. Two hundred fifty million metric tonnes of cement are produced annually to fulfill the building industry‘s demand, causing approximately 1.6 billion metric tonnes of carbon emissions just in 2022.
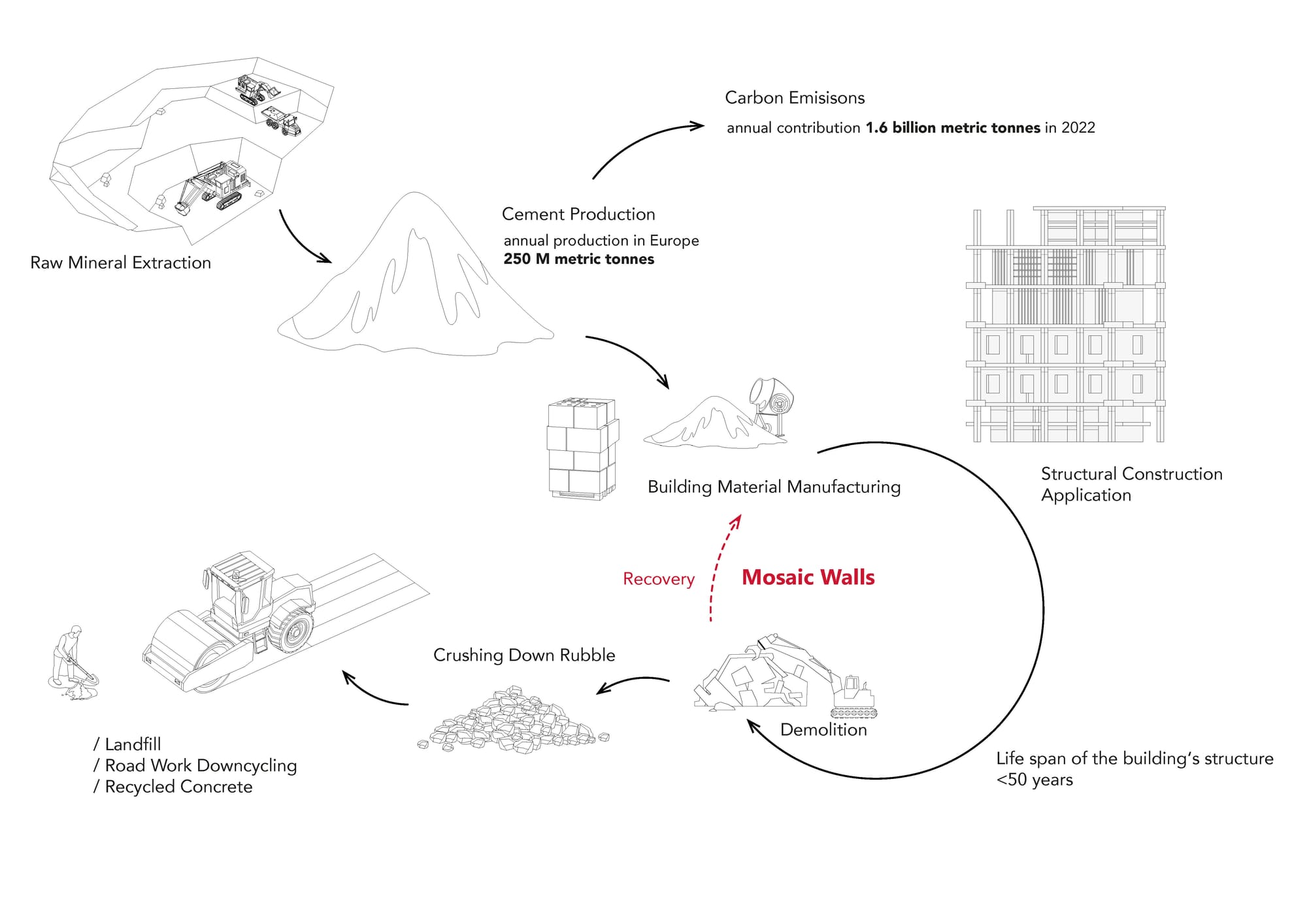
However, avoiding concrete can be tricky since few alternatives meet the material properties and have lower embodied carbon and cost. Meanwhile, the vast amount of concrete produced gets either landfilled or downcycled. In the best case, it ends up as an aggregate for recycled concrete or as filling material for road works. Proper reuse of the rubble as a structural material presents vast challenges. It is heavy and irregular; therefore, it is difficult for humans to efficiently process, sort, and assemble new products from the rubble.
How can raw concrete rubble pieces be repurposed in new load-bearing walls using digital tools and robotics?
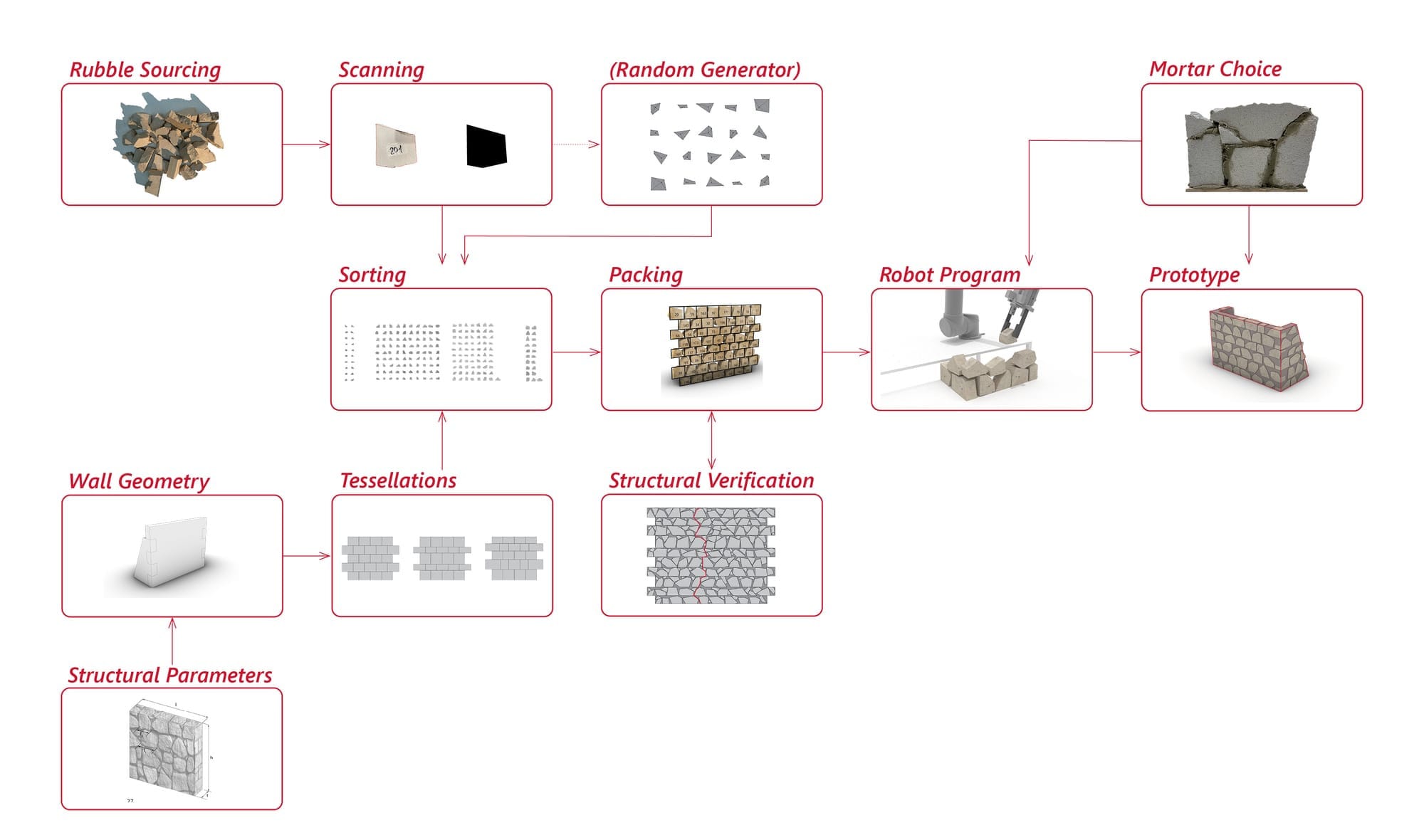
The project aims to design an efficient workflow for designing and constructing a load-bearing wall out of raw concrete rubble using a sorting algorithm and a robotic assembly. It involves optimizing the rubble placement into a structurally load-bearing geometry with minimal computing power and guiding the robotic arm to build the structure.
The project is inspired by the pioneering research done by Maxence Grangeot (2023-24) at EPFL. The objective is to enrich it by adding the wall‘s lateral stability and enabling a construction process without formwork. Buttresses are introduced into the geometry to interlock with the main wall. To achieve this, openings are introduced into the stacking algorithm. The computational workflow combines Visual Studio Code with Python in Grasshopper to make full use of Python libraries and work directly with vector geometries.
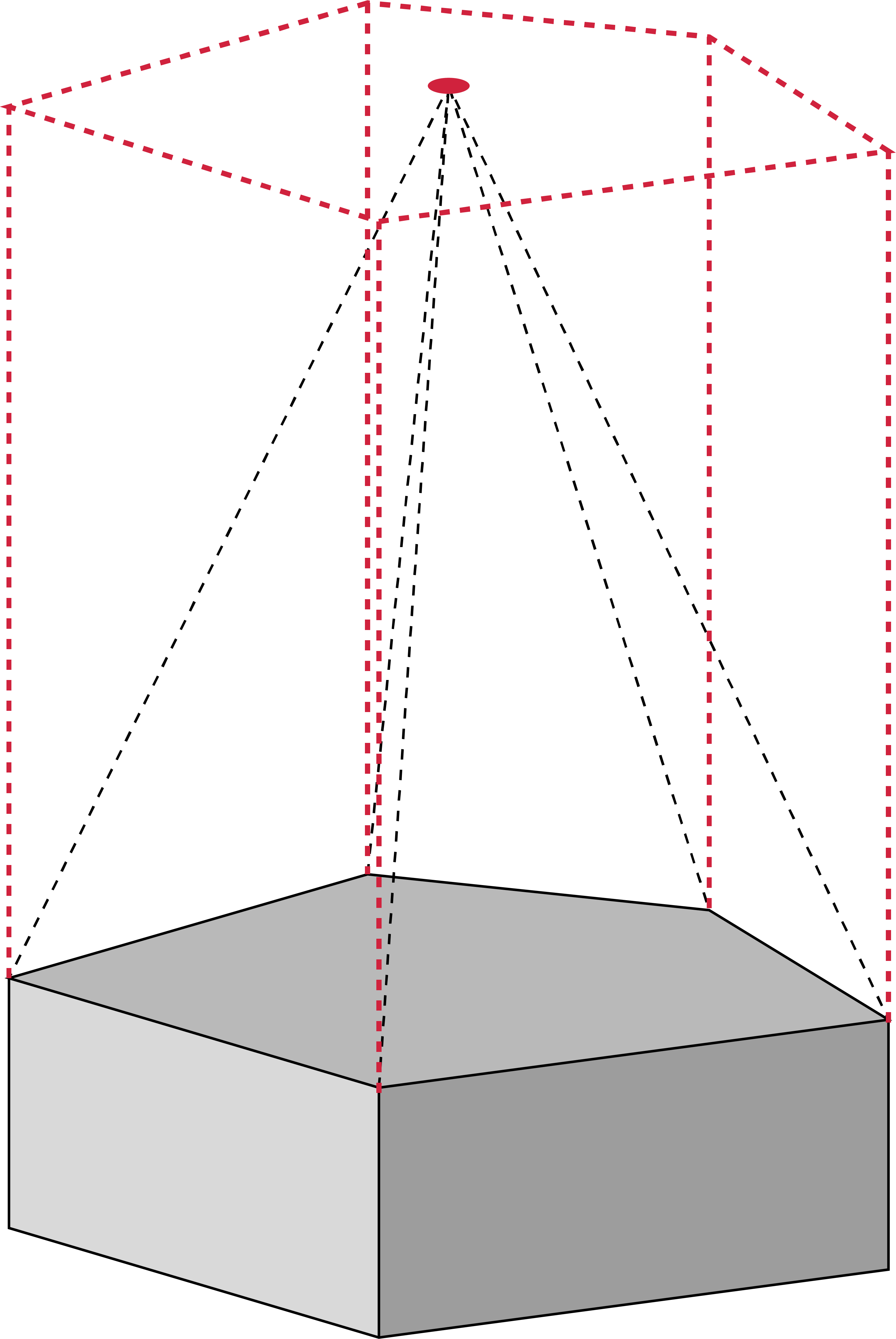
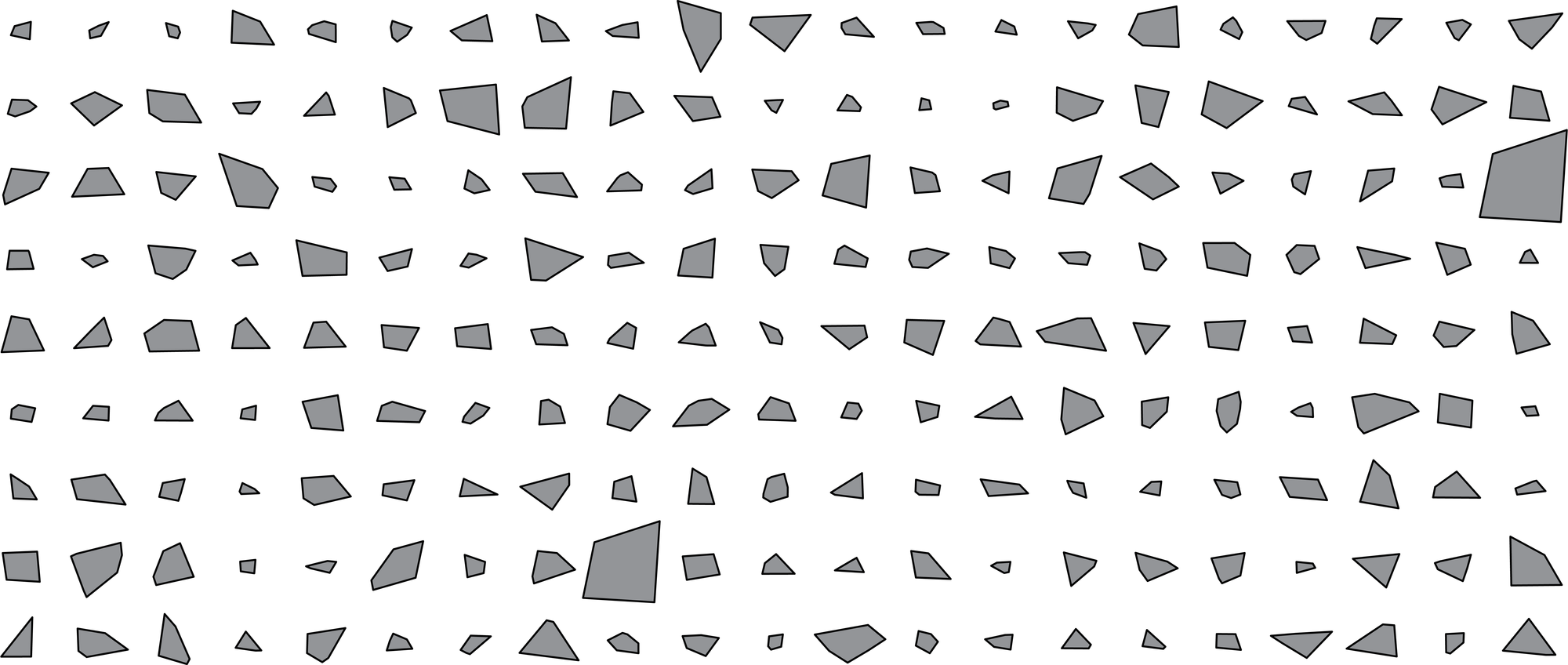
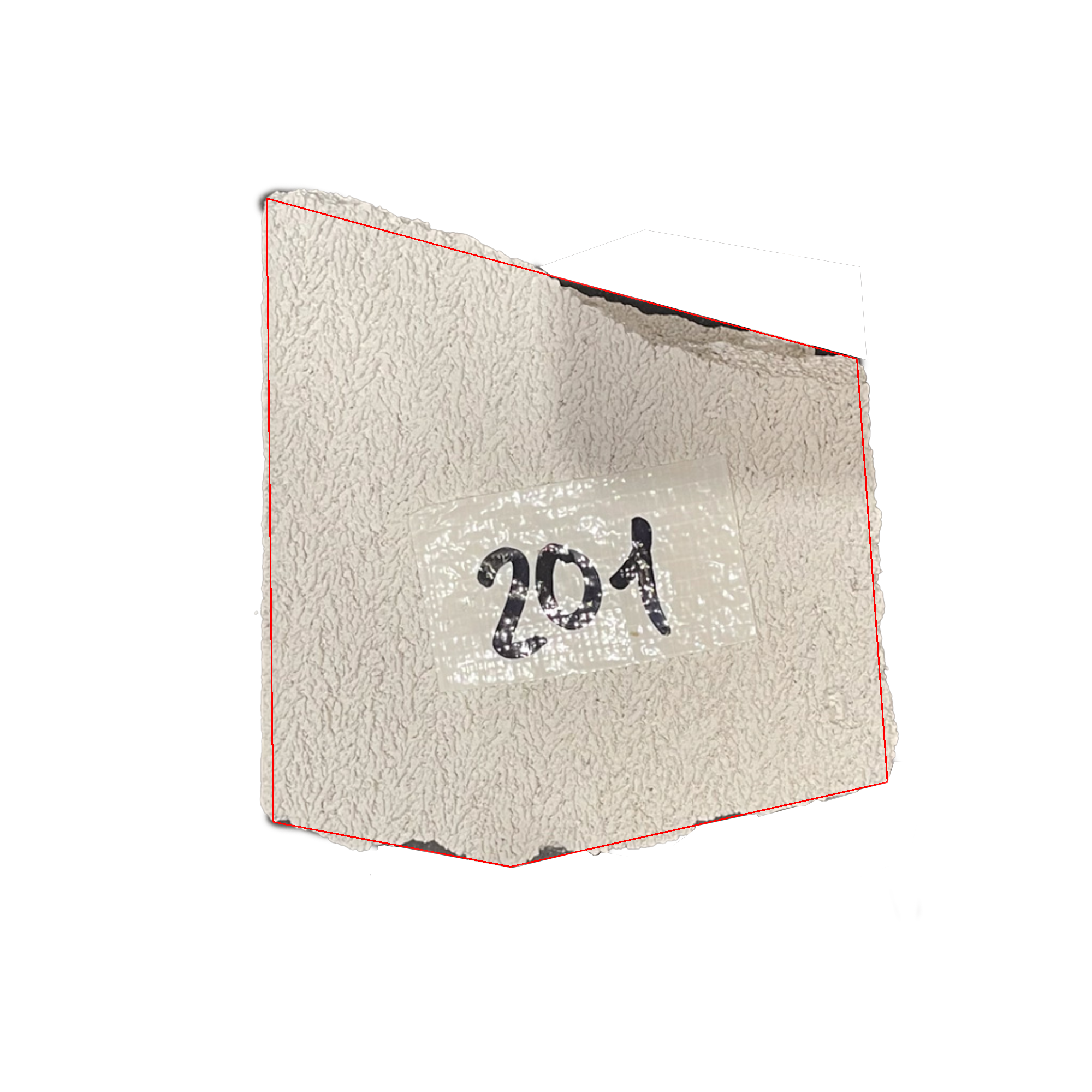
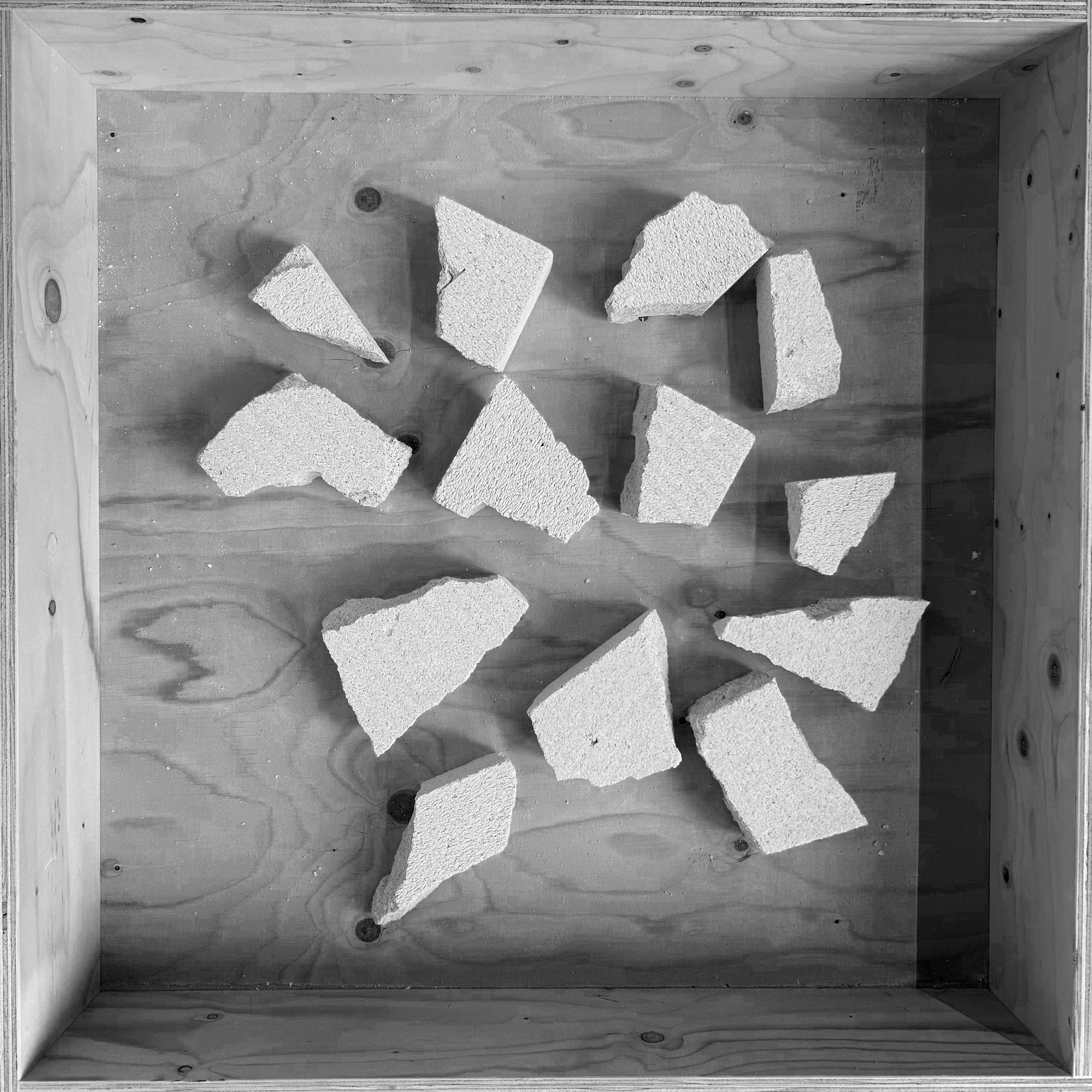
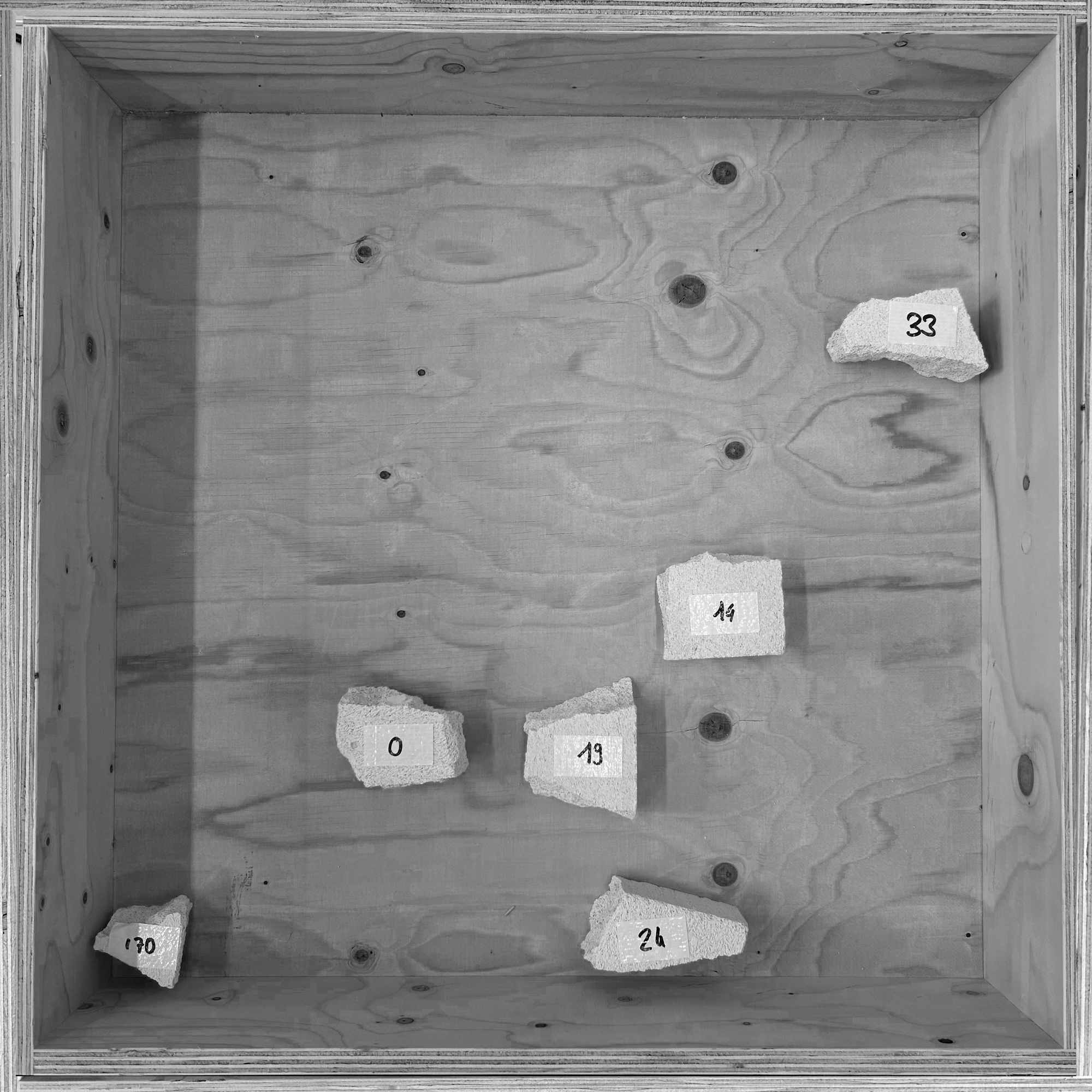
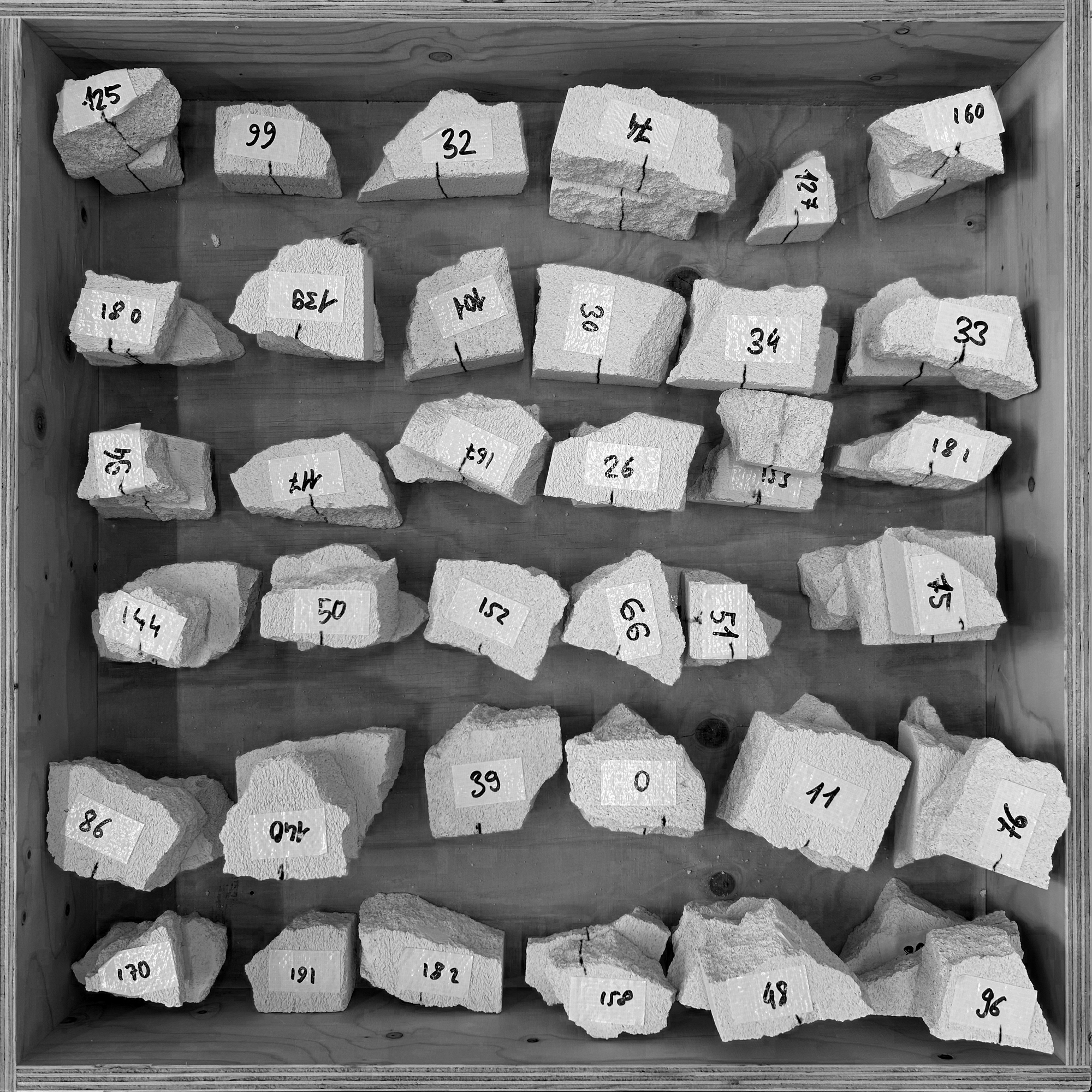
2D scanning process
Stones were scanned on 200×200 mm black paper using an iPhone mounted on a custom tripod, ensuring all images were comparable. Each 50 mm-thick stone was photographed from a consistent 405 mm height. Stones were numbered, scanned in sequence, and placed into labeled buckets of 40. Two people scanned 201 stones in about two hours, enabling easy retrieval for prototype building.
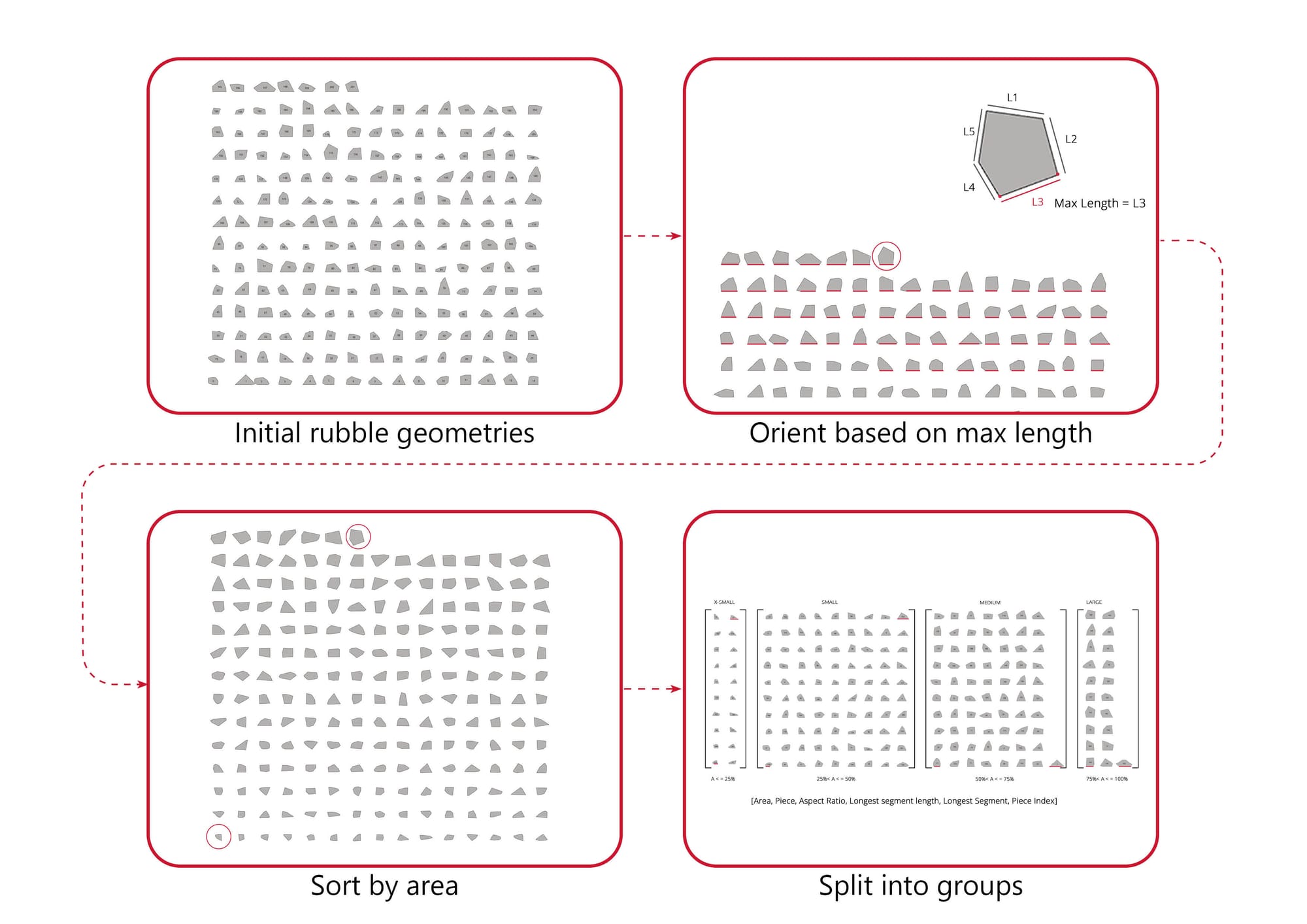
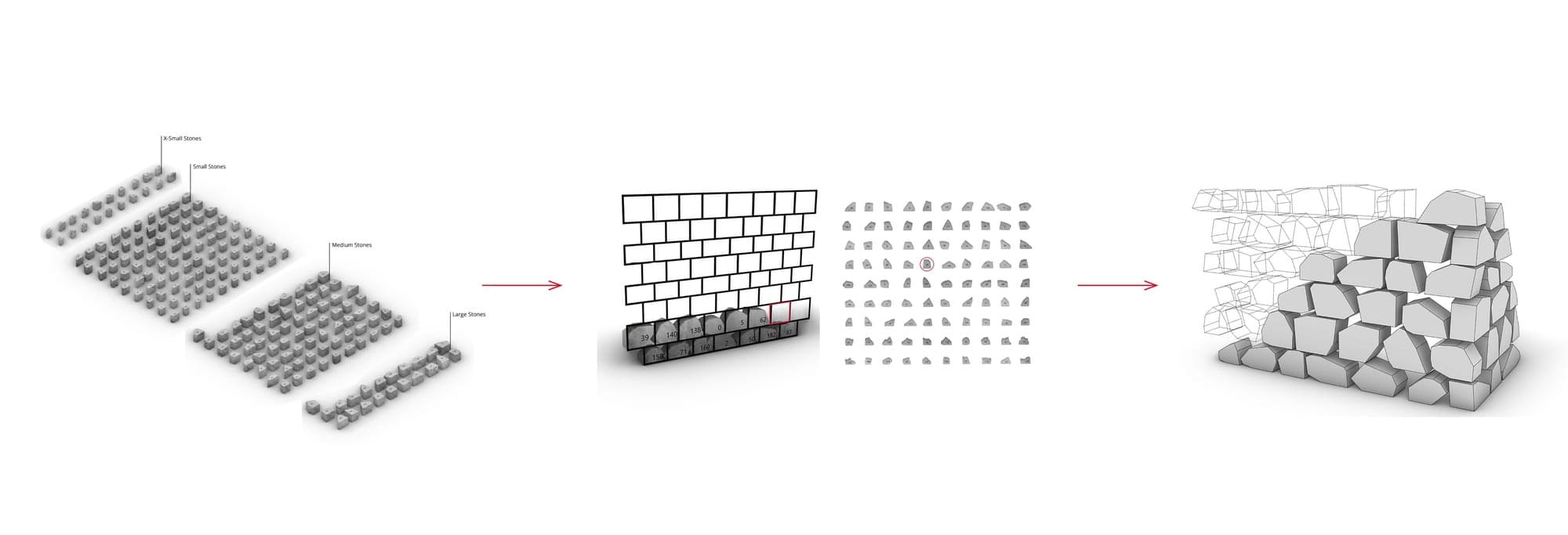
Curves are grouped by area relative to the largest, oriented along their longest segment, and sorted by segment length. Precomputed properties (area, aspect ratio, longest segment, index) reduce redundant calculations, improving packing speed and accuracy.
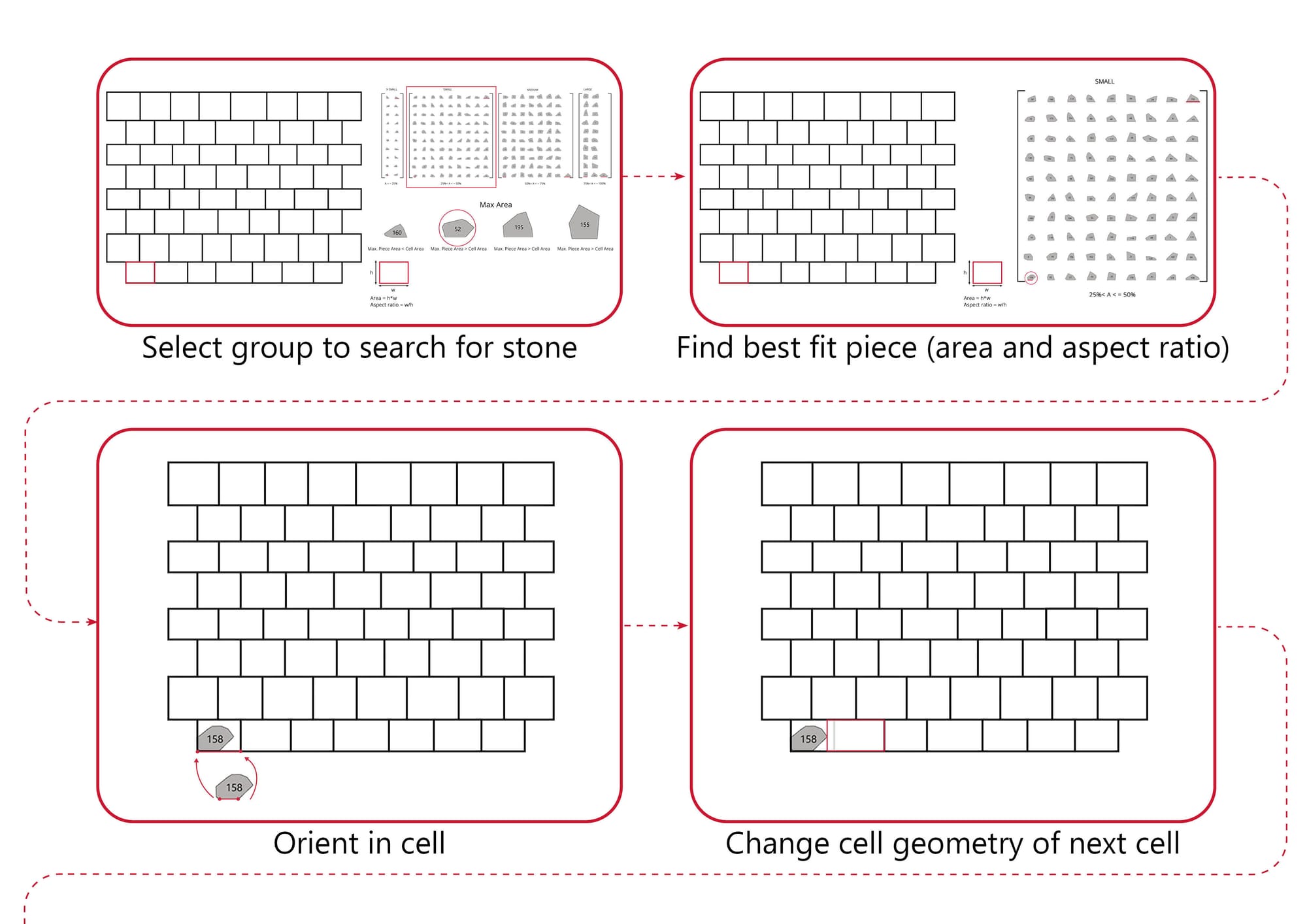
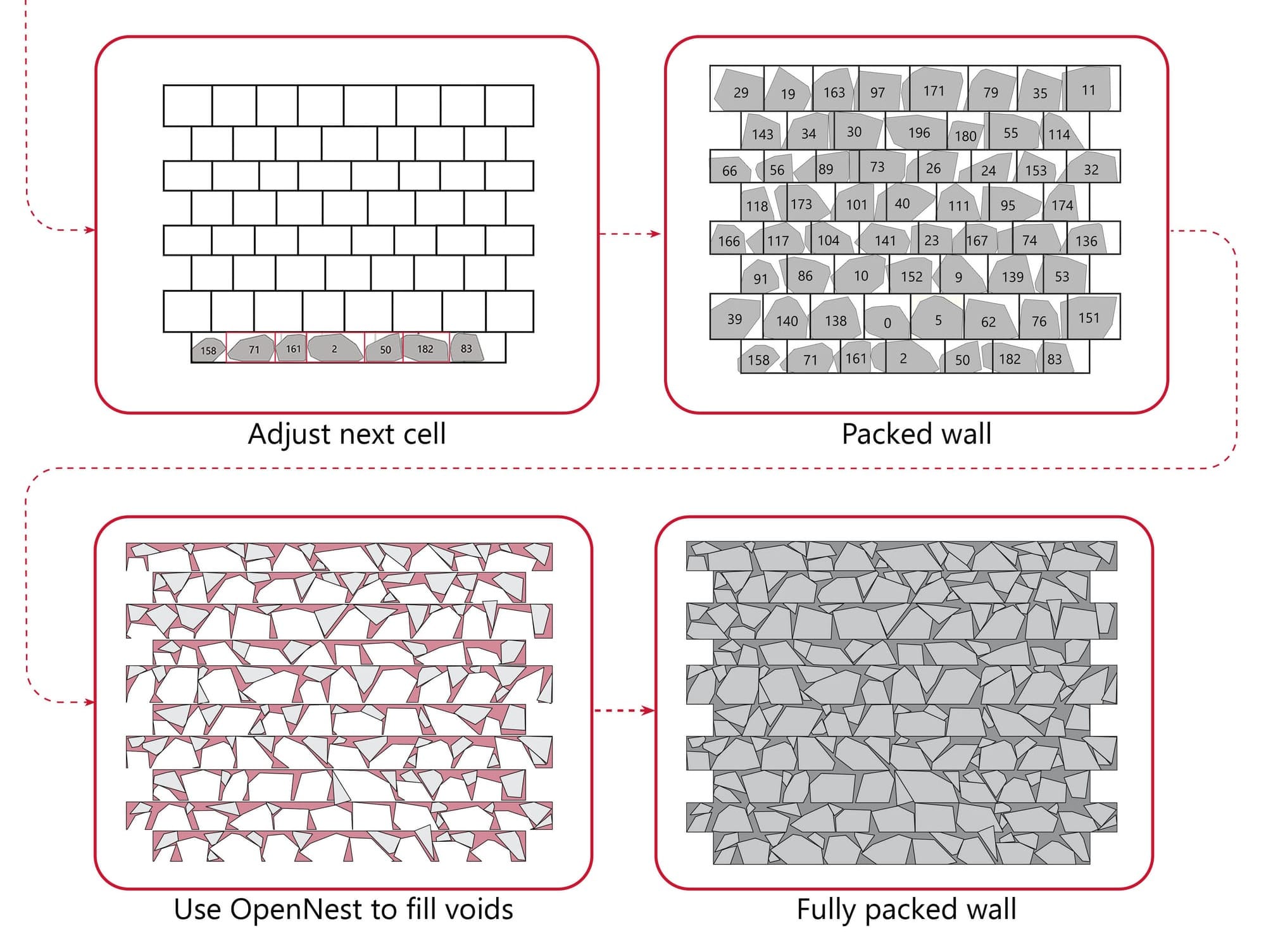
The packing algorithm matches tessellation cells with the best-fitting stones by comparing cell area and aspect ratio to precomputed stone properties. Stones are oriented to align with the cell’s base, checked for fit, and placed to minimize gaps, with adjustments made to adjacent cells.
structural verification
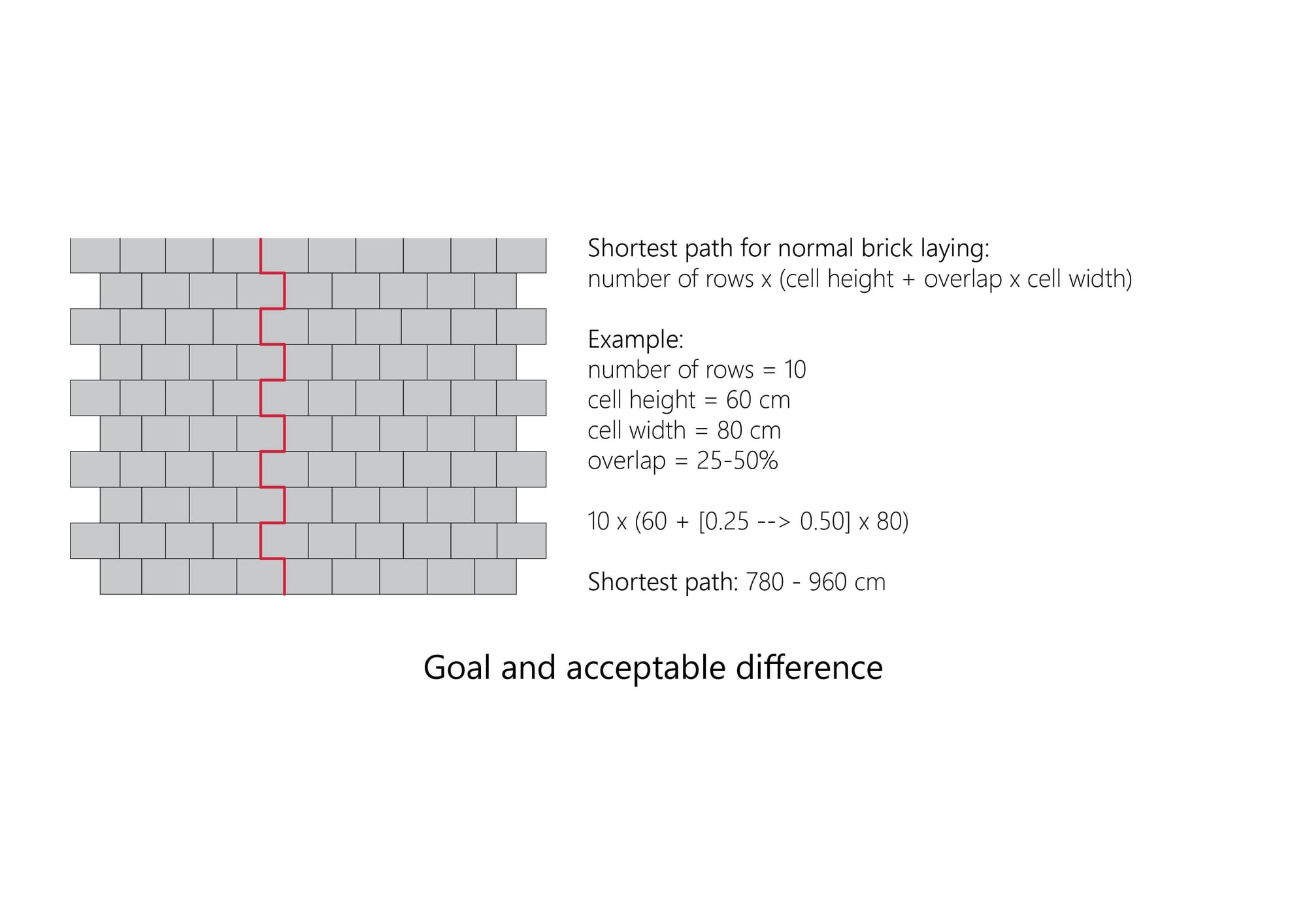
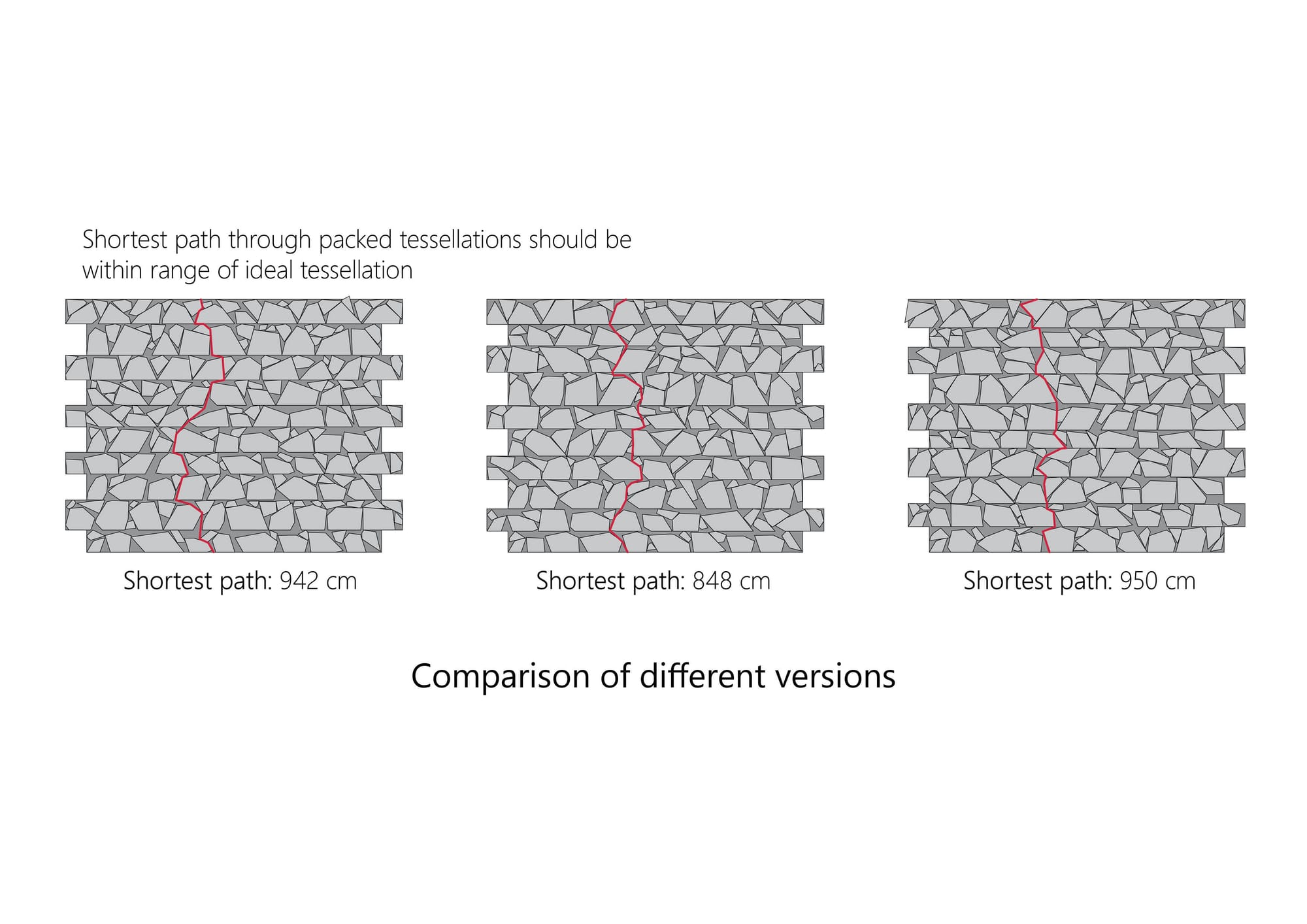
The shortest path through mortar under load indicates likely failure. Comparing this path in target and packed rubble walls can predict structural performance. Future tests on walls with the same tessellation could build a performance database.
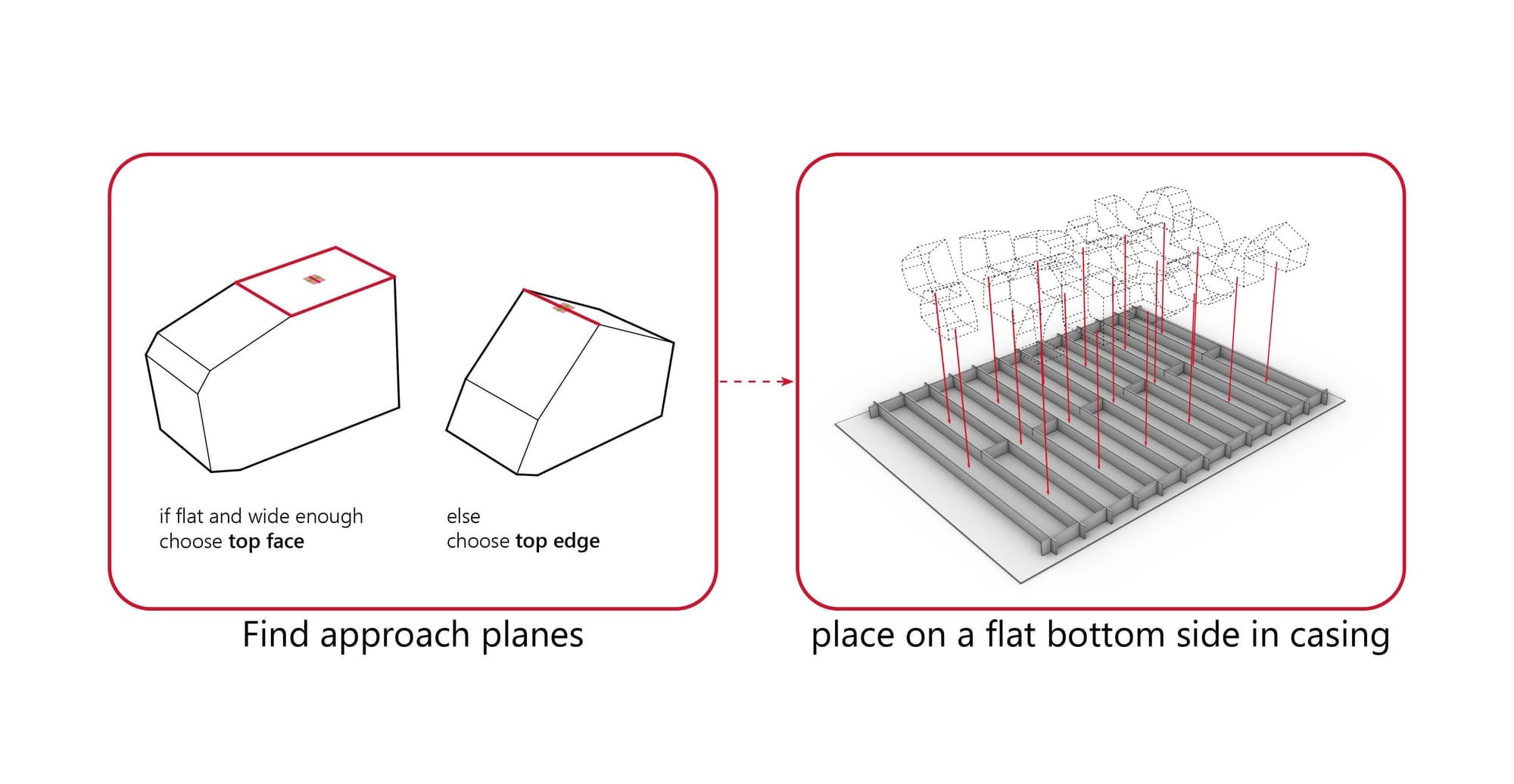
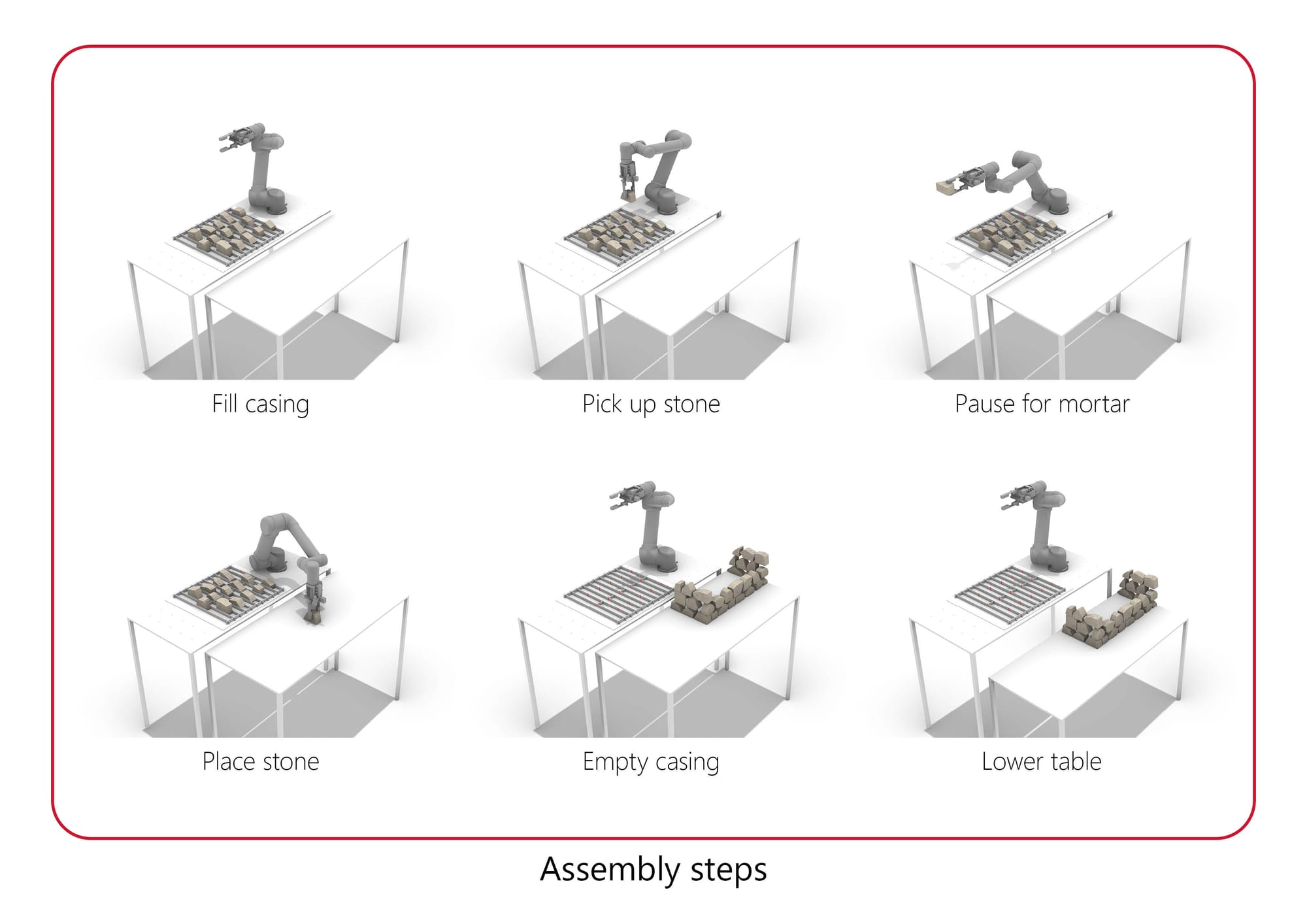
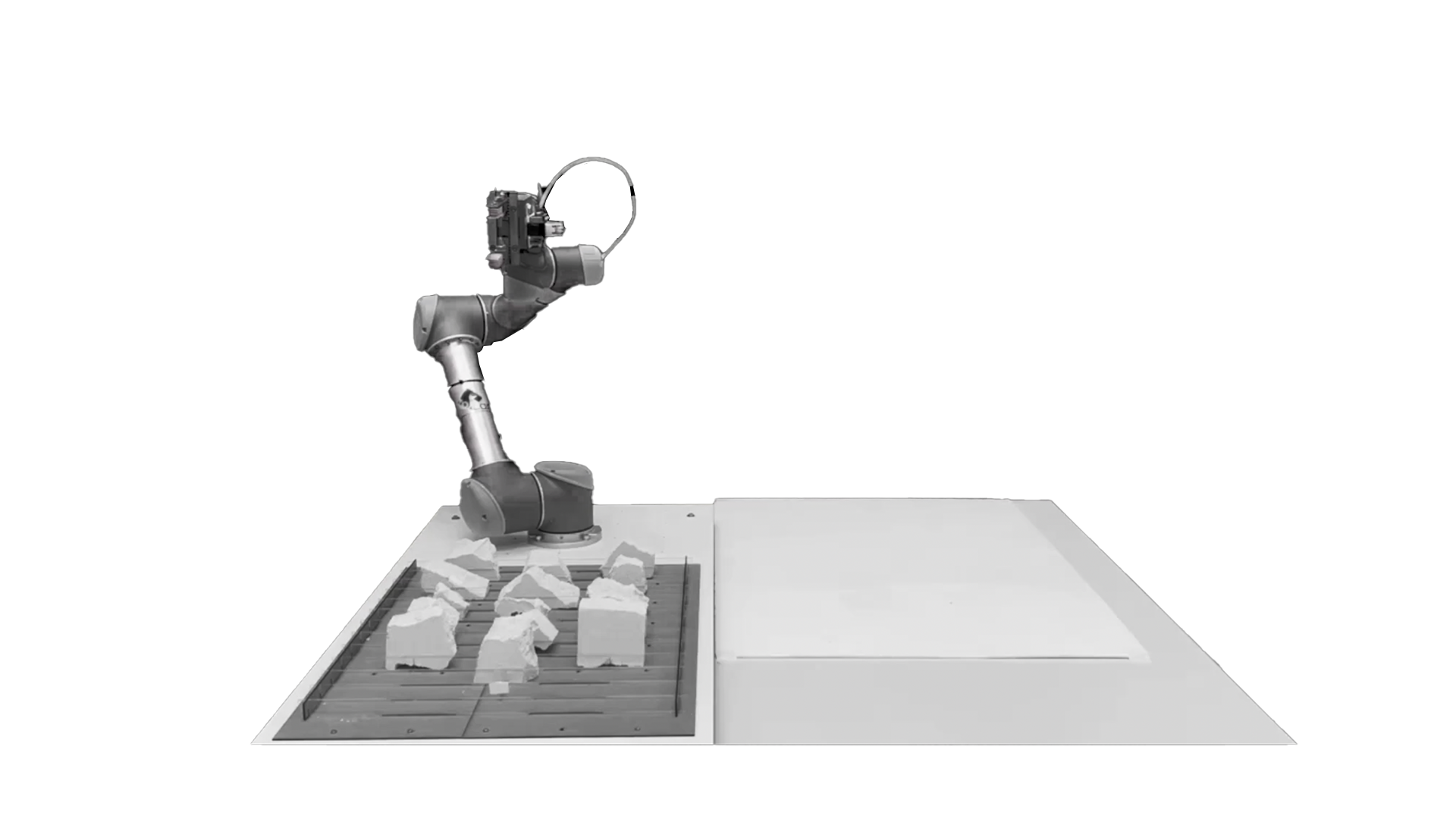
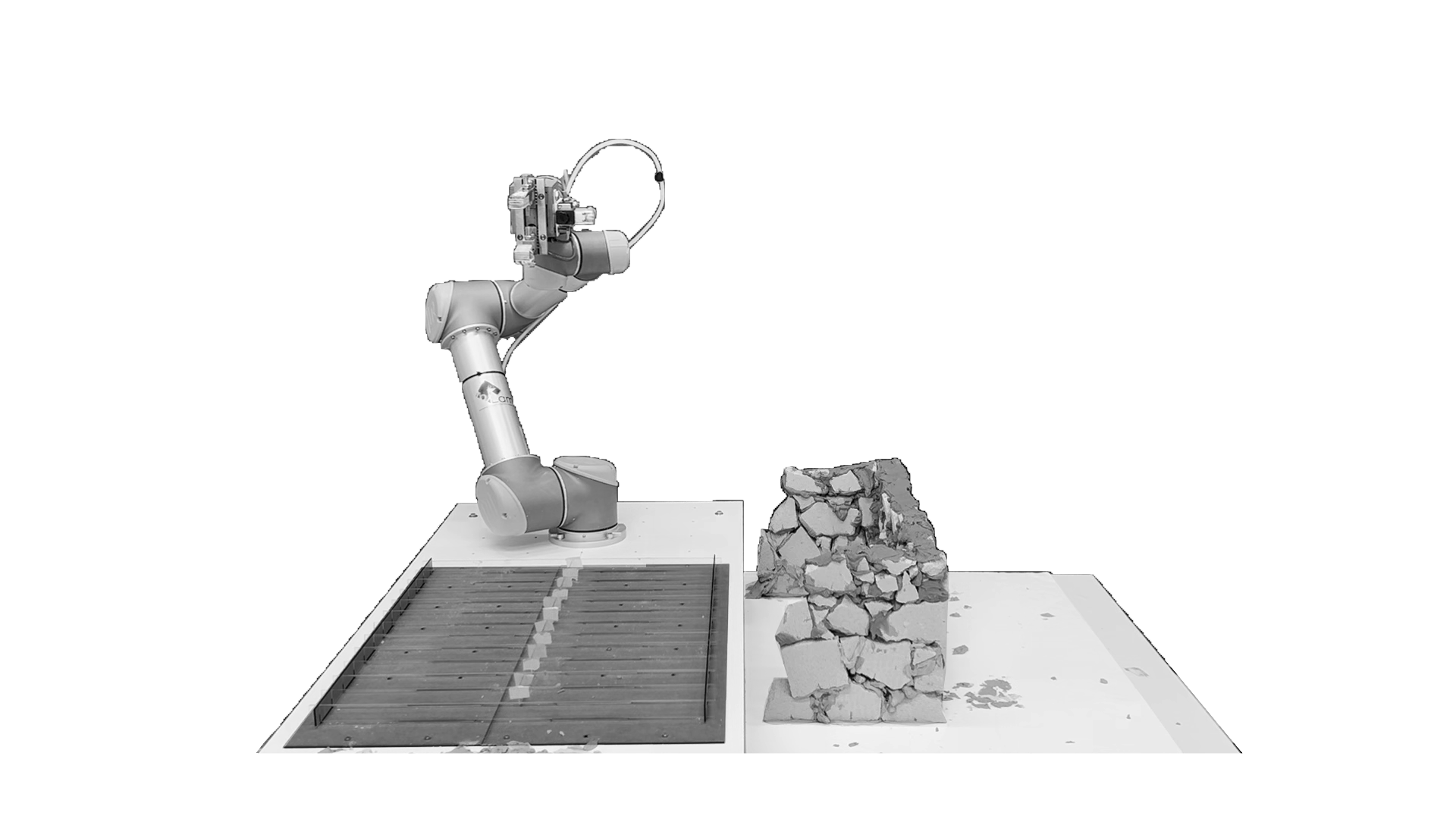
robotic assembly pick and place script
The wall is scaled 1:5 for assembly with a UR5 robot and custom air-pressure gripper, enabling flexible human–robot collaboration. The robot places stones in rounds of 15, pausing for mortar application, refilling, and for humans to adjust rows with small stones. A height-adjustable table extends the workspace, allowing the prototype to be built higher and lowered for access to upper rows.


Academic Work, 2024
As part of the course AR3B012 CORE
coordinated by Dr. Serdar Asut
Delft University of Technology